





UTS Rocketry - Ground Station and Launch Controller
Timothy Gibson, Samuel Cain-Copnall, Robin Biskupic, Denisse Fernandez
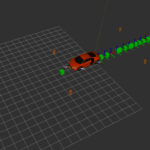
Self-Driving Pursuit Algorithm on a Simulated Track
Nathan Turner
LED Fan Display
Sebastian Smith
Human Detection using Sensors on a Drone
Anika Roth
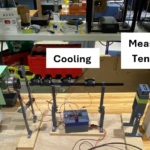
Plastic Filament Extruder for 3D Printing
Jeremy Chu, Duc Do, Jonathan Harris, Mark Lu
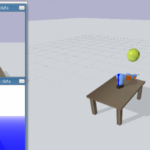
Robotic Arm Collision Avoidance
Yara Fakoua, Damian Sue, Iraklis Roussos, Morne Kruger

Cyclone Arcade Game
Noah Yom-Tov

Tetris Master 3000
Christopher Gilmore, Johnson Ly, Aidan Korpar, Liam Faulkner-Hogg
Sci-Fi Animal Helmet
Michael Lee
Autonomous Track Racer with Teleoperational Control
Luke Howard

Candy King - Voice Activated Candy Dispensing Robot
Daniya Syed
Tunable Ideochord
Oliver Shields
Long Thinh Le
Samiul Khan
Samuel Carlton
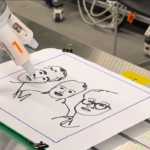
Selfie Drawing Robot
Dennis Nguyen,
Long Thinh Le,
Samuel Bloomfield,
Stewart Kelly

Multi-Agent Automated Turtlebot Warehouse
Brendan White, Daniel Chen, John Hunter, Liam Hogarth

Turtlebot3 Warehousing Robots
Aidan Korpar,
Callum Power,
Kevin Biddulph,
Johnson Ly
PR2
Anh Minh Tu

VR Engineering Lab Safety Training
Daniel Ugarte
Carrot - The Seed-Collecting Robot
Aaditya Mishra, Amanda Yousif, Benjamin Hendry, Daniya Syed, Zain Khan

AAA Warman Project
Jessica Le,
Tom Mihalic,
Amy Zhong,
Abisha Nasim,
Aiden Lee
Pedro (Warman #3)
Isabelle Wilkins,
Natalia Gandera
WarMan
Sebastian Baudille,
Samuel Heinz,
Yuto Boittiaux,
Guy Smith,
Nicholas Sabatta
Warman Design & Build Challenge - #5
Fergus Hudson, Daniel Bell, Harry Jackson
Warman Design & Build Challenge - #6
Julian Baeza, Jonah Gonzales, Xuan Kien Nguyen, Yu-Chia Chang